Many people have written about using a CDM chart to obtain an optimised matrix for their camera. In a moment I will discuss the best technique that I believe enables you to do this, but let’s first take a moment to think about why we might want to optimise our matrix.
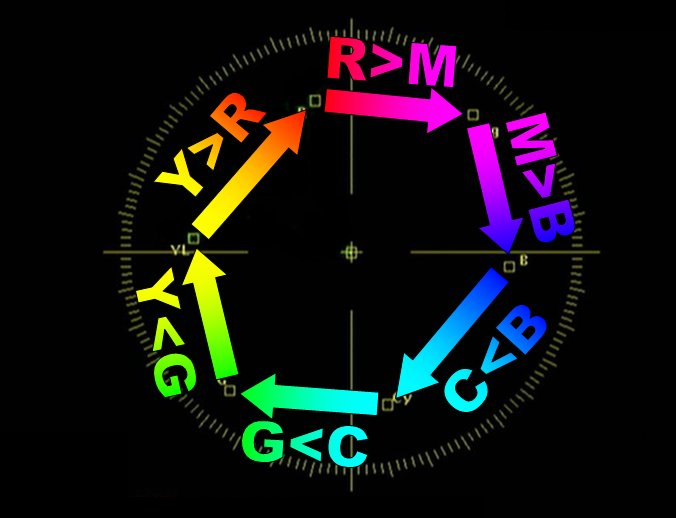
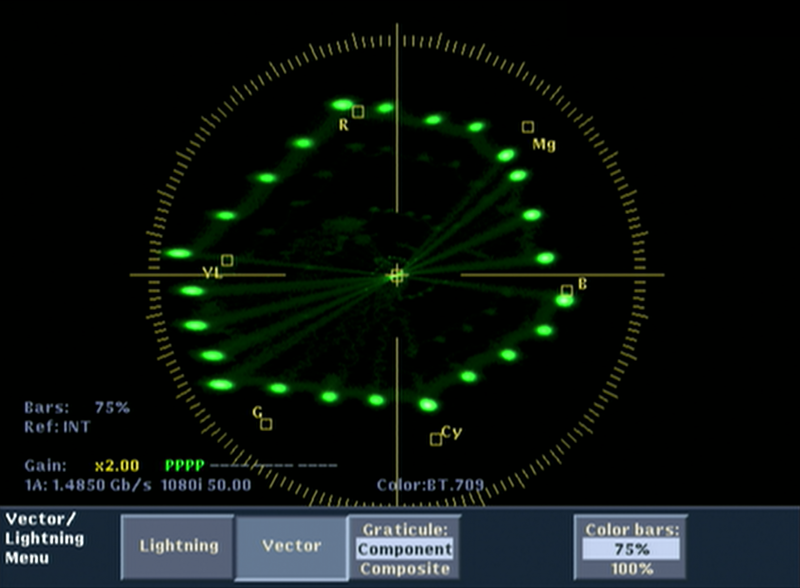
If a CDM chart is to be trusted then the colours it displays, once viewed through a correctly white-balanced camera, should appear at certain pre-determined points on the vectorscope under ITU-709 recommendations. Not all cameras do this for various reasons. This could be because they are trying to emphasise what their camera does well, or perhaps mask some deficiencies. Perhaps there are regional preferences where certain attributes are considered more important than accurate reproduction.
Regardless, the reason we might want to do is with the aim of reproducing the scene as realistically as possible. As an engineer this should be your first starting point. It is essential to get the camera performing to the best of its ability before building any custom look.